Engineering student Manuel Dangel of Swiss Federal Institute of Technology (ETH) in Zurich and teammates were walking the racecourse at Formula Student Driverless in Hockenheimring, Germany, earlier this month when they realized that the computerized wheelbarrow they were using to map the course had gone haywire. [See “Students Race Driverless Cars in Germany in Formula Student Competition” 16 August 2017.]
As part of the track-drive event, one of several events that make up the entire competition, the rules permit teams half an hour to walk the racecourse and make measurements they might need to program their driverless cars. Because the track-drive event consists of ten solo laps on the same, unchanging course among traffic cones, “the basic strategy is to run within the map,” Dangel says. If you cannot make a map before the event, though, you have to switch to a more complex strategy.
The car, which the Zurich student engineers named “Flüela” in honor of a Swiss mountain pass, is a veteran of the 2015 Formula Student Electric race. Its builders gave it two types of eyes: lidar and optical, along with several ways of measuring its ground velocity. They also gave it two ways of navigating: following a pre-loaded map, or building a map of its own during the first couple of laps, which requires slower driving and trustworthy sensors.
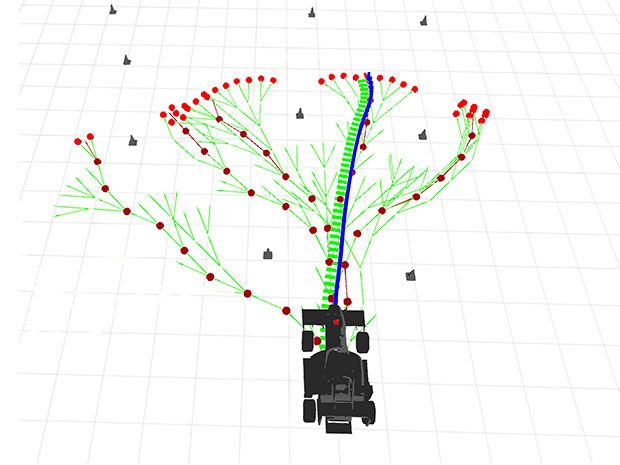
For the car to build its own map, it had to use the lidar to distinguish the triangles of the traffic cones and determine the likeliest correct path between the cones. That is harder than it sounds, because lidar does not detect colors, which is how the race organizers distinguished between cones on the left and right side of the track. Instead, the students had to program a probability tree, as shown in the image. Identifying cones may seem obvious to humans, but to a computer they can look a lot like objects in the background, such as tall grass. Water on the track can also reflect images of cones that appear to be below ground level, further confusing things. A lot of driverless driving may be in the eyes, but even more is in the brains.
Once the team realized that their manual map-making wasn’t working, they activated the so-called discover mode so the car could map the cones itself as it drove. The discover mode also drew on an independent optical camera system that could detect the colors of the cones and provide a cross-check. That system is borrowed from an ETH algorithm developed for an unrelated drone, Dangel says.
And while both the lidar and optical algorithms should help the car find its position relative to the map it is building, an accurate ground speed is a crucial factor for correcting for the lidar system’s spinning and motion through space. In test vehicles, car manufacturers tend to use optical ground sensors, which work like your optical mouse, Dangel says. And some teams at the event used differential GPS, which compares ground-based signals to satellite signals to localize the car in space. But neither option is feasible in production cars, which must be more independent and more in tune with their environment. “We had to do a very similar tradeoff as in industry,” Dangel says.
So, the team used wheel-speed sensors, which are not ideal, because fast racing involves burning rubber as wheels grip the road for acceleration and steering. In other words, the car itself does not move at exactly the speed its wheels might imply. In this case, the team decided to disable the car’s traction control, so they could use the wheel speed sensors alongside an inertial measurement unit. The velocity information they got was clean enough to feed the lidar and stay on track.
The tradeoffs the team made meant that their car was not the fastest on the track-drive, but it was the only one to complete all the laps. The second-place team, which instead of building a map of the track relied on a kind of obstacle-avoidance system, “saw ghost cones,” Dangel says, and froze twice. It didn’t help that race organizers placed the cones closer than they had announced, and some cars’ algorithms would not let the cars drive through the narrower track.
All the complexity means it may be years before Formula Student Driverless cars race wheel-to-wheel. Dangel doesn’t dare pronounce when they will be ready but he says, “it will be really interesting and really hard.”
See the video here: